मैग्नबेंड विकास और निर्माण का इतिहास
विचार की उत्पत्ति:
1974 में मुझे इलेक्ट्रॉनिक परियोजनाओं के आवास के लिए बक्से बनाने की जरूरत थी।ऐसा करने के लिए मैंने अपने आप को एक बहुत ही कच्चा शीटमेटल फ़ोल्डर बना लिया, जिसमें लोहे के कोण के दो टुकड़े एक साथ टिके हुए थे और एक वाइस में रखे गए थे।कम से कम कहने के लिए यह उपयोग करने के लिए बहुत अजीब था और बहुत बहुमुखी नहीं था।मैंने जल्द ही फैसला किया कि यह कुछ बेहतर करने का समय है।
तो मैं सोच रहा था कि 'उचित' फ़ोल्डर कैसे बनाया जाए।एक बात जो मुझे चिंतित करती थी, वह यह थी कि क्लैम्पिंग संरचना को मशीन के आधार पर या तो सिरों पर या पीछे से बांधना पड़ता था और यह कुछ चीजों के रास्ते में आने वाला था जो मैं बनाना चाहता था।तो मैंने विश्वास की छलांग लगाई और कहा ... ठीक है, क्लैम्पिंग स्ट्रक्चर को आधार से नहीं बांधता, मैं वह काम कैसे कर सकता हूं?
क्या उस संबंध को तोड़ने का कोई तरीका था?
क्या आप किसी वस्तु को बिना कुछ जोड़े उसे पकड़ सकते हैं?
यह पूछने के लिए एक हास्यास्पद सवाल की तरह लग रहा था लेकिन एक बार जब मैंने इस तरह से सवाल तैयार किया तो मैं एक संभावित उत्तर के साथ आया: -
आप चीजों को बिना किसी भौतिक संबंध के प्रभावित कर सकते हैं ... एक FIELD के माध्यम से!
मैं विद्युत क्षेत्र*, गुरुत्वाकर्षण क्षेत्र* और चुंबकीय क्षेत्र* के बारे में जानता था।लेकिन क्या यह संभव होगा?क्या यह वास्तव में काम करेगा?
(* एक तरफ यह ध्यान रखना दिलचस्प है कि आधुनिक विज्ञान अभी तक पूरी तरह से स्पष्ट नहीं कर पाया है कि "दूरी पर बल" वास्तव में कैसे काम करता है)।

आगे क्या हुआ यह अभी भी एक स्पष्ट स्मृति है।
मैं अपने होम वर्कशॉप में था और आधी रात के बाद और सोने का समय हो गया था, लेकिन मैं इस नए विचार को आजमाने के प्रलोभन का विरोध नहीं कर सका।
मुझे जल्द ही एक घोड़े की नाल का चुंबक और शिम पीतल का एक टुकड़ा मिला।मैंने शिम पीतल को चुंबक और उसके 'कीपर' के बीच रखा और पीतल को अपनी उंगली से झुका दिया!
यूरेका!इसने काम कर दिया।पीतल केवल 0.09 मिमी मोटा था लेकिन सिद्धांत स्थापित किया गया था!
(बाईं ओर की तस्वीर मूल प्रयोग का पुनर्निर्माण है लेकिन यह उन्हीं घटकों का उपयोग कर रही है)।
मैं उत्साहित था क्योंकि मैंने शुरू से ही महसूस किया था कि अगर इस विचार को व्यावहारिक तरीके से काम करने के लिए बनाया जा सकता है तो यह शीटमेटल बनाने के तरीके में एक नई अवधारणा का प्रतिनिधित्व करेगा।
अगले दिन मैंने अपने काम के सहयोगी टोनी ग्रिंगर को अपने विचारों के बारे में बताया।वह थोड़ा उत्साहित भी था और उसने मेरे लिए एक इलेक्ट्रोमैग्नेट के लिए एक संभावित डिज़ाइन तैयार किया।उन्होंने कुछ गणनाएँ भी कीं कि विद्युत चुंबक से किस प्रकार के बल प्राप्त किए जा सकते हैं।टोनी सबसे चतुर व्यक्ति था जिसे मैं जानता था और मैं बहुत भाग्यशाली था कि मुझे एक सहयोगी के रूप में मिला और उसकी काफी विशेषज्ञता तक मेरी पहुंच थी।
खैर शुरू में ऐसा लग रहा था कि यह विचार शायद केवल शीटमेटल के काफी पतले गेज के लिए काम करेगा, लेकिन यह मुझे आगे बढ़ने के लिए प्रोत्साहित करने के लिए पर्याप्त आशाजनक था।
प्रारंभिक विकास:
अगले कुछ दिनों में मैंने स्टील के कुछ टुकड़े, कुछ तांबे के तार और एक रेक्टिफायर प्राप्त किया और अपना पहला इलेक्ट्रो-मैग्नेटिक फोल्डर बनाया!मेरे पास अभी भी यह मेरी कार्यशाला में है:

इस मशीन का इलेक्ट्रो-मैग्नेट पार्ट असली ओरिजिनल है।
(यहां दिखाया गया फ्रंट पोल और बेंडिंग बीम बाद के संशोधन थे)।
हालांकि क्रूड के बजाय इस मशीन ने काम किया!
जैसा कि मेरे मूल यूरेका पल में परिकल्पित किया गया था, वास्तव में क्लैंपिंग बार को मशीन के आधार पर सिरों पर, पीछे या कहीं भी संलग्न करने की आवश्यकता नहीं थी।इस प्रकार मशीन पूरी तरह से ओपन-एंडेड और ओपन-थ्रोटेड थी।
लेकिन ओपन-एंडेड पहलू को पूरी तरह से तभी महसूस किया जा सकता है जब झुकने वाले बीम के लिए टिका भी थोड़ा अपरंपरागत हो।
आने वाले महीनों में मैंने एक तरह के आधे-अंजीर पर काम किया जिसे मैंने 'कप-हिंज' कहा, मैंने एक बेहतर प्रदर्शन करने वाली मशीन (मार्क II) का निर्माण किया, मैंने ऑस्ट्रेलियाई पेटेंट कार्यालय के साथ एक अनंतिम पेटेंट विशिष्टता दर्ज की और मैं भी दिखाई दिया एक एबीसी टेलीविजन कार्यक्रम जिसे "द इन्वेंटर्स" कहा जाता है।मेरा आविष्कार उस सप्ताह के लिए विजेता के रूप में चुना गया था और बाद में उस वर्ष (1975) के लिए फाइनलिस्ट में से एक के रूप में चुना गया।

बायीं ओर मार्क II बेंडर है जैसा कि द इन्वेंटर्स के फाइनल में उपस्थिति के बाद सिडनी में प्रदर्शित किया गया था।
इसने 'कप हिंज' के अधिक विकसित संस्करण का उपयोग किया जैसा कि नीचे दिखाया गया है:

1975 के दौरान मैं होबार्ट (3 अगस्त 1975) में एक इन्वेंटर्स एसोसिएशन की बैठक में ज्योफ फेंटन से मिला।ज्योफ "मैग्नाबेंड" आविष्कार में काफी रुचि रखते थे और बैठक के बाद इसे करीब से देखने के लिए मेरे स्थान पर वापस आ गए।यह ज्योफ के साथ एक स्थायी मित्रता और बाद में एक व्यापारिक साझेदारी की शुरुआत थी।
ज्योफ एक इंजीनियरिंग स्नातक और खुद एक बहुत ही चतुर आविष्कारक थे।उन्होंने आसानी से एक हिंग डिज़ाइन के महत्व को देखा जो मशीन को अपनी पूर्ण ओपन-एंडेड क्षमता का एहसास करने की अनुमति देगा।
मेरा 'कप हिंज' काम कर गया लेकिन 90 डिग्री से अधिक बीम कोणों के लिए गंभीर समस्याएं थीं।
ज्योफ केंद्रहीन टिका में बहुत रुचि रखते थे।काज का यह वर्ग एक आभासी बिंदु के चारों ओर धुरी प्रदान कर सकता है जो पूरी तरह से काज तंत्र के बाहर हो सकता है।
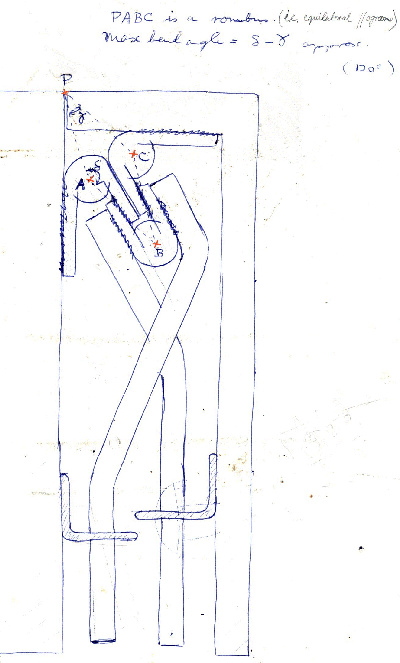
एक दिन (1 फरवरी 1976) ज्योफ एक असामान्य और अभिनव दिखने वाले काज के चित्र के साथ आया।मैं हैरान था!मैंने पहले कभी दूर से ऐसा कुछ नहीं देखा था!
(बाईं ओर चित्र देखें)।
मैंने सीखा कि यह एक संशोधित पेंटोग्राफ तंत्र है जिसमें 4-बार लिंकेज शामिल हैं।हमने वास्तव में इस काज का एक उचित संस्करण कभी नहीं बनाया, लेकिन कुछ महीनों बाद ज्योफ एक बेहतर संस्करण के साथ आया, जिसे हमने बनाया।
उन्नत संस्करण का एक क्रॉस सेक्शन नीचे दिखाया गया है:
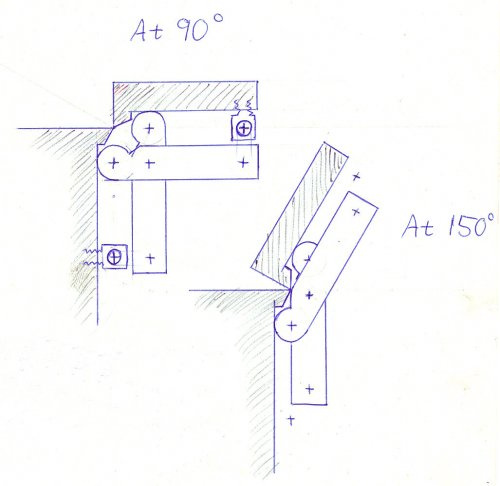
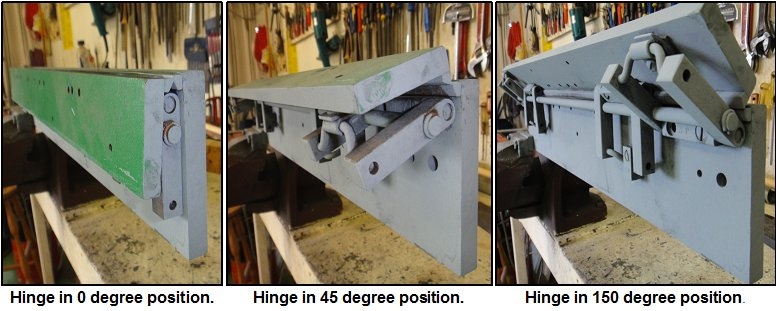
इस काज के 'हथियारों' को छोटे क्रैंक द्वारा मुख्य धुरी वाले सदस्यों के समानांतर रखा जाता है।इन्हें नीचे दी गई तस्वीरों में देखा जा सकता है।क्रैंक को केवल कुल काज भार का एक मामूली प्रतिशत लेना होता है।
इस तंत्र का अनुकरण नीचे दिए गए वीडियो में दिखाया गया है।(इस अनुकरण के लिए डेनिस एस्पो को धन्यवाद)।
https://youtu.be/wKxGH8nq-tM
हालांकि इस काज तंत्र ने काफी अच्छा काम किया, लेकिन इसे वास्तविक मैग्नाबेंड मशीन पर कभी भी स्थापित नहीं किया गया था।इसकी कमियां यह थी कि यह झुकने वाले बीम के पूर्ण 180 डिग्री रोटेशन के लिए प्रदान नहीं करता था और ऐसा लगता था कि इसमें बहुत सारे हिस्से हैं (हालांकि कई हिस्से एक दूसरे के समान थे)।
दूसरा कारण यह था कि इस काज का उपयोग नहीं किया गया था क्योंकि ज्योफ ने उसके साथ आया था:
त्रिअक्षीय काज:
त्रिअक्षीय काज ने पूरे 180 डिग्री रोटेशन के लिए प्रदान किया था और यह सरल था क्योंकि इसमें कम भागों की आवश्यकता थी, हालांकि भाग स्वयं अधिक जटिल थे।
त्रिअक्षीय काज काफी व्यवस्थित डिजाइन तक पहुंचने से पहले कई चरणों में आगे बढ़ा।हमने विभिन्न प्रकारों को द ट्रुनियन हिंज, द स्फेरिकल इंटरनल हिंग और द स्फेरिकल एक्सटर्नल हिंग कहा।
गोलाकार बाहरी काज नीचे दिए गए वीडियो में सिम्युलेटेड है (इस सिमुलेशन के लिए जैसन वालिस को धन्यवाद):
https://youtu.be/t0yL4qIwyYU
इन सभी डिज़ाइनों का वर्णन यूएस पेटेंट विशिष्टता दस्तावेज़ (पीडीएफ) में किया गया है।
मैग्नाबेंड हिंज के साथ सबसे बड़ी समस्या यह थी कि इसे लगाने के लिए कहीं नहीं था!
मशीन के सिरे बाहर हैं क्योंकि हम चाहते हैं कि मशीन ओपन-एंडेड हो, इसलिए इसे कहीं और जाना है।झुकने वाले बीम के आंतरिक चेहरे और चुंबक के सामने वाले ध्रुव के बाहरी चेहरे के बीच वास्तव में कोई जगह नहीं है।
जगह बनाने के लिए हम झुकने वाले बीम और सामने के ध्रुव पर एक होंठ प्रदान कर सकते हैं लेकिन ये होंठ झुकने वाले बीम की ताकत और चुंबक के क्लैंपिंग बल से समझौता करते हैं।(आप इन होंठों को ऊपर पेंटोग्राफ हिंज की तस्वीरों में देख सकते हैं)।
इस प्रकार काज डिजाइन पतले होने की आवश्यकता के बीच विवश है ताकि केवल छोटे होंठों की आवश्यकता हो और मोटे होने की आवश्यकता हो ताकि यह पर्याप्त मजबूत हो।और केंद्रविहीन होने की भी आवश्यकता है ताकि एक आभासी धुरी प्रदान की जा सके, अधिमानतः चुंबक की कार्य-सतह के ठीक ऊपर।
इन आवश्यकताओं को एक बहुत लंबा आदेश दिया गया था, लेकिन ज्योफ के बहुत ही आविष्कारशील डिजाइन ने आवश्यकताओं को अच्छी तरह से संबोधित किया, हालांकि सर्वोत्तम समझौता खोजने के लिए बहुत सारे विकास कार्य (कम से कम 10 वर्षों तक विस्तार) की आवश्यकता थी।
यदि अनुरोध किया जाए तो मैं टिका और उनके विकास पर एक अलग लेख लिख सकता हूं लेकिन अभी के लिए हम इतिहास पर लौटेंगे:
निर्माण-अंडर-लाइसेंस समझौते:
आने वाले वर्षों में हमने कई "विनिर्माण-अंडर-लाइसेंस" समझौतों पर हस्ताक्षर किए:
6 फरवरी 1976: नोवा मशीनरी प्राइवेट लिमिटेड, ओसबोर्न पार्क, पर्थ वेस्टर्न ऑस्ट्रेलिया।
31 दिसंबर 1982: थालमन कंस्ट्रक्शन एजी, फ्रौएनफेल्ड, स्विट्जरलैंड।
12 अक्टूबर 1983: रोपर व्हिटनी कंपनी, रॉकफोर्ड, इलिनोइस, यूएसए।
1 दिसंबर, 1983: जोर्ग मशीन फैक्ट्री, एमर्सफोर्ट, हॉलैंड
(अधिक इतिहास यदि किसी इच्छुक पार्टी द्वारा अनुरोध किया गया हो)।